Sie sind mehrere Tonnen schwer. Sie geschickt über die Felder zu lenken, bedarf jahrelanger Erfahrung: Ohne Mähdrescher würde die Landwirtschaft in ihrer heutigen Form nicht bestehen. Doch können selbst riesige Fahrzeuge wie diese fahrerlos betrieben werden? Noch ist autonomes Fahren im öffentlichen Straßenverkehr gesetzlich verboten – doch technologisch möglich. Diese Technologie für den Nutzfahrzeugbereich zu adaptieren und weiterzuentwickeln verspricht vielfältige Vorteile. EDAG treibt hier entscheidende Schritte mit voran.
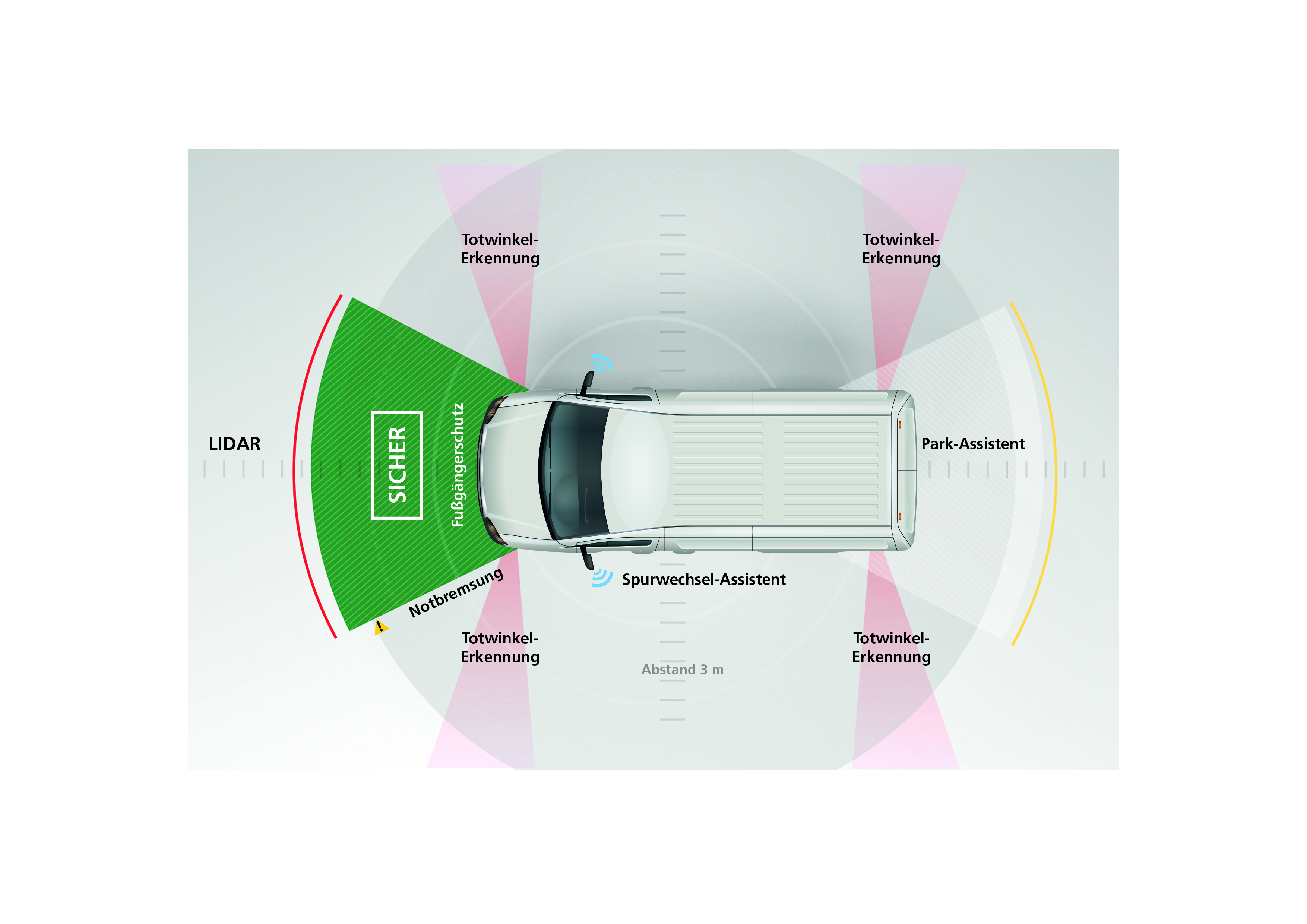
Fahrzeuge parken heute selbstständig ein, halten die Spur oder den notwendigen Sicherheitsabstand. Das zeigt: Technisch ist viel möglich – auch völlig autonomes Fahren. Doch dafür fehlen derzeit die gesetzlichen Rahmenbedingungen. Fahrzeuge dürfen sich noch nicht voll autonom im öffentlichen Straßenverkehr bewegen. Die Verantwortung muss beim Fahrer bleiben, auch wenn er durch Komfort- und Sicherheitssysteme unterstützt wird.
Vollziehen wir einen Sprung hin zum Nutzfahrzeugbereich, werden auch hier viele Anwendungsfelder für autonomes Fahren im nicht-öffentlichen Bereich ersichtlich. Der fahrerlose Betrieb spart Kosten und erhöht die Genauigkeit und Verfügbarkeit. Menschen können darüber hinaus bei risikobehafteten Aufgaben, wie beispielsweise im Bergbau, beim Abtransport kontaminierter Materialien oder Off-Road entlastet und geschützt werden.
Automatisierung im Nutzfahrzeugbereich – eine Herausforderung?
Bei EDAG blicken wir auf vielfältige Kundenprojekte im Bereich automatisiertes Fahren zurück – sowohl bei der Systemauslegung auf Fahrzeugebene als auch bei der Steuergeräteentwicklung. Wir haben mehrere wertschöpfende Praxiseinsätze mit Umfelderkennung und Sensordatenfusion für Automotive-Kunden realisiert und die dafür notwendigen Algorithmen selbst entwickelt.
Wie können wir diese Erfahrung nutzen? Dazu setzen wir existierende Lösungen häufig „zweckentfremdet“ ein. So ist der Ansatz, ein zentrales Gateway in die Elektrik/Elektronik-Fahrzeugarchitektur zu integrieren. Dieses sammelt die bestehenden Fahrzeugfunktionen ein und ermöglicht eine zielgerichtete Modifikation. Funktionale Sicherheit und Schutz vor Manipulationen (Security) sind hier grundlegend, um Umwelt, Daten und Menschen zu schützen.
EDAG hat eine System- und Software-Plattform entwickelt. Diese basiert auf Embedded Universal-Steuergeräten und ermöglicht autonomes Fahren auch für größere Fahrzeugflotten von bis zu 500 Serienfahrzeugen. Um auf unterschiedliche Anforderungen unserer Kunden zu reagieren, haben wir die Plattform generisch aufgesetzt.
Werfen wir einen Blick auf ausgewählte Funktionen, die unsere generische Plattform beinhaltet – denn der fahrerlose Betrieb von meist großen Maschinen im Nutzfahrzeugbereich bringt weitere gesetzliche und technische Herausforderungen mit sich.
Bestens geplant: Auf die Bahnplanung kommt es an
Die Bahnplanung ist entscheidend, um die Fahrzeuge sicher in der vorgesehenen Route zu bewegen. Dabei gibt es zwei Optionen, je nach Anwendungsfall: eine Live-Berechnung der Fahrstrecke oder eine virtuelle Planung mittels einer im Steuergerät oder in einer Leitzentrale hinterlegten Karte.
Das Fahrzeug muss im fahrerlosen Einsatz zuverlässig die jeweilige Ist-Position ermitteln. Im Outdoor-Bereich geschieht dies über ein Globales Navigationssatellitensystem (GNSS), wie GPS oder Galileo. Hinzu kommen Korrektursysteme, die ebenfalls auf Satelliten oder installierten Referenzstation basieren. Da es aber dennoch zu Abweichungen zwischen Ist- und Soll-Position kommen kann, setzen viele ergänzende Infrastrukturmaßnahmen zur Lokalisierung ein. Das können beispielsweise RFID-Transponder auf Straßen oder Ultrawideband Referenzsender an Objekten sein.

Die Umgebung im Blick: zuverlässige Umfeld-Erkennung
Die Sensorik steht gerade im Outdoor-Bereich vor vielfältigen Herausforderungen. Umgebungsbedingungen verändern sich, beispielsweise durch Staub, Regen oder Nebel. Auch die Beschaffenheit der detektierten Oberfläche ist nicht konstant gleich. Wie können hier Fehler vermieden werden?
Eine zuverlässige Lösung bietet der Einsatz redundanter Systeme, die auf unterschiedlichen Technologien basieren. Die Rohdaten werden ausgewertet und zu einer intelligenten Logik fusioniert. Wie viele verschiedene Technologien zum Einsatz kommen, unterscheidet sich je nach Anwendungsfall – Kosten und Nutzen müssen hier individuell betrachtet werden.
Stetig in der vorgegebenen Bahn: Die Regelung macht's
Auch bei äußeren Störungen muss ein Fahrzeug der Bahn folgen und darf diese nicht plötzlich verlieren. Hierfür kommen Strategien der Bahnregelung zum Einsatz ¬die sicherstellen, dass das Fahrzeug in der festgelegten Bahn bleibt. Die Längs- und Querregelung übernimmt das Fahrzeugsteuergerät (VCU). Sie steuert auch die Lenkung, die Beschleunigung, das Verzögern oder Schalten von weiteren Funktionen wie Licht und Blinker.
Sensoren überwachen die Bahnregelung. Verschiedene Sensordaten, wie die seitliche Abweichung des Fahrzeugs zur festgelegten Bahn oder mögliche Ausrichtungsfehler werden ständig erfasst und an die VCU übermittelt. Dort werden die Daten aufbereitet, gefiltert und in ein einheitliches Format umgerechnet – somit kann festgestellt werden, ob das Fahrzeug vom festgelegten Sollwert abweicht. Kurz gesagt: Es wird in Echtzeit überwacht, ob sich das Fahrzeug noch in der zuvor definierten Bahn befindet.
Automatische Nothalt-Funktion erhöht Sicherheit
Wie erwähnt, steht das Thema Sicherheit beim autonomen Fahren immer an erster Stelle. Die Lokalisierung des Fahrzeugs muss also zuverlässig funktionieren. Die Daten aus der Eigenlokalisierung werden darum mit denen aus der Trajektorie ständig abgeglichen und Regelabweichungen erkannt. Überschreitet der Abstand zwischen eigener Position und Referenztrack einen zuvor definierten Schwellenwert, kann beispielsweise eine Nothalt-Funktion greifen. Diese erhöht das Sicherheitsniveau enorm.
Die Kundenanforderungen im Blick: individuelle Systemspezifikationen
Wir entwickeln das zugrundeliegende System, um autonomes Fahren weiter voranzubringen – doch dabei stehen individuelle Kundenwünsche im Mittelpunkt. Bei der Entwicklung arbeiten wir darum von Anfang an mit unseren Kunden zusammen und erfassen deren Anforderungen. Zusammen analysieren wir die Gefahren und Risiken und können so das Sicherheitslevel des Systems definieren. Erst dann beginnen wir mit der kundenspezifischen Applikationsentwicklung.
Unsere Embedded Systems liefern einen zukunftsfähigen Beitrag zur Fahrzeugautomatisierung. Da die Projekte skalierbar sind, reichen sie von Prototypen und Showcase-Szenarien bis hin zu Produktivlösungen. Dabei stehen Qualität und Sicherheit an erster Stelle. Unsere Systeme sind so generisch wie möglich und anwendungsfall- und kundenspezifisch wie möglich. Wir entwickeln Automatisierungssysteme ganzheitlich und integrieren diese in die Fahrzeugflotten unserer Kunden.
Sie haben ein konkretes Projekt oder möchten mehr zum Thema autonomes Fahren wissen? Nehmen Sie gerne Kontakt mit Peter Weismüller, Project Manager Embedded Systems, auf oder laden Sie sich unser kostenfreies Whitepaper „Abseits der Straße: Die Zukunft fährt fahrerlos - Der Einsatz automatisierter Technologien für fahrerlose Transportaufgaben“ herunter.





